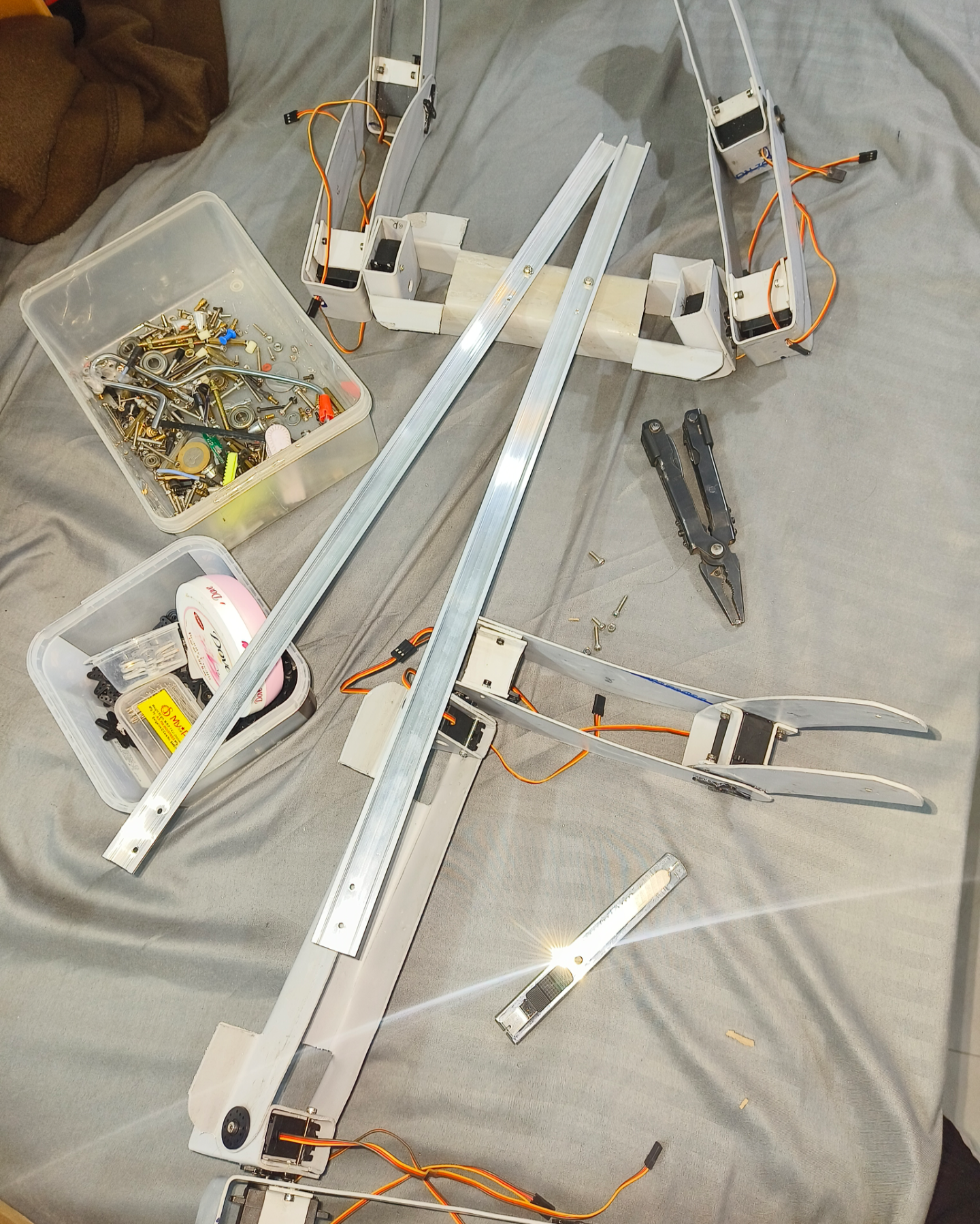
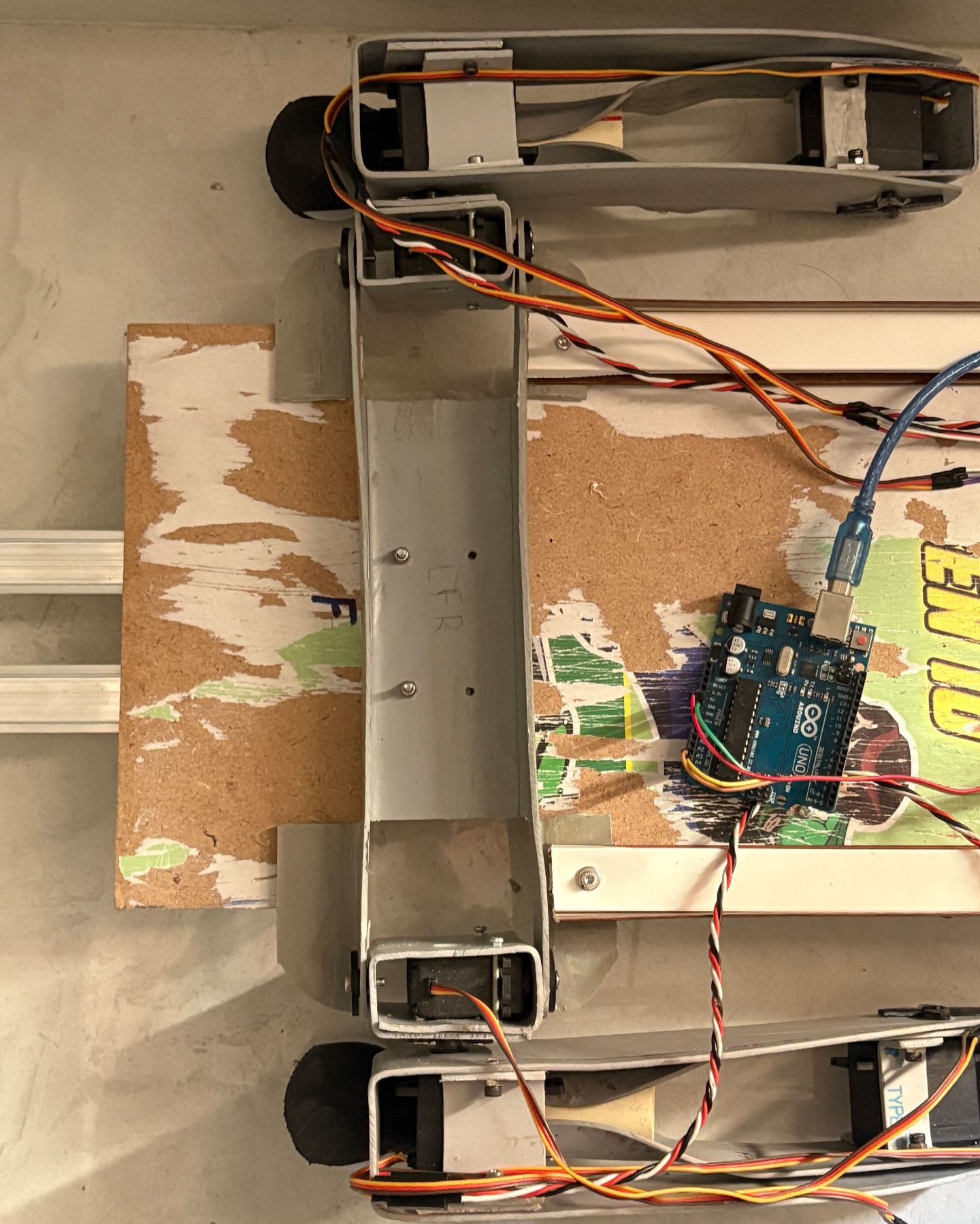
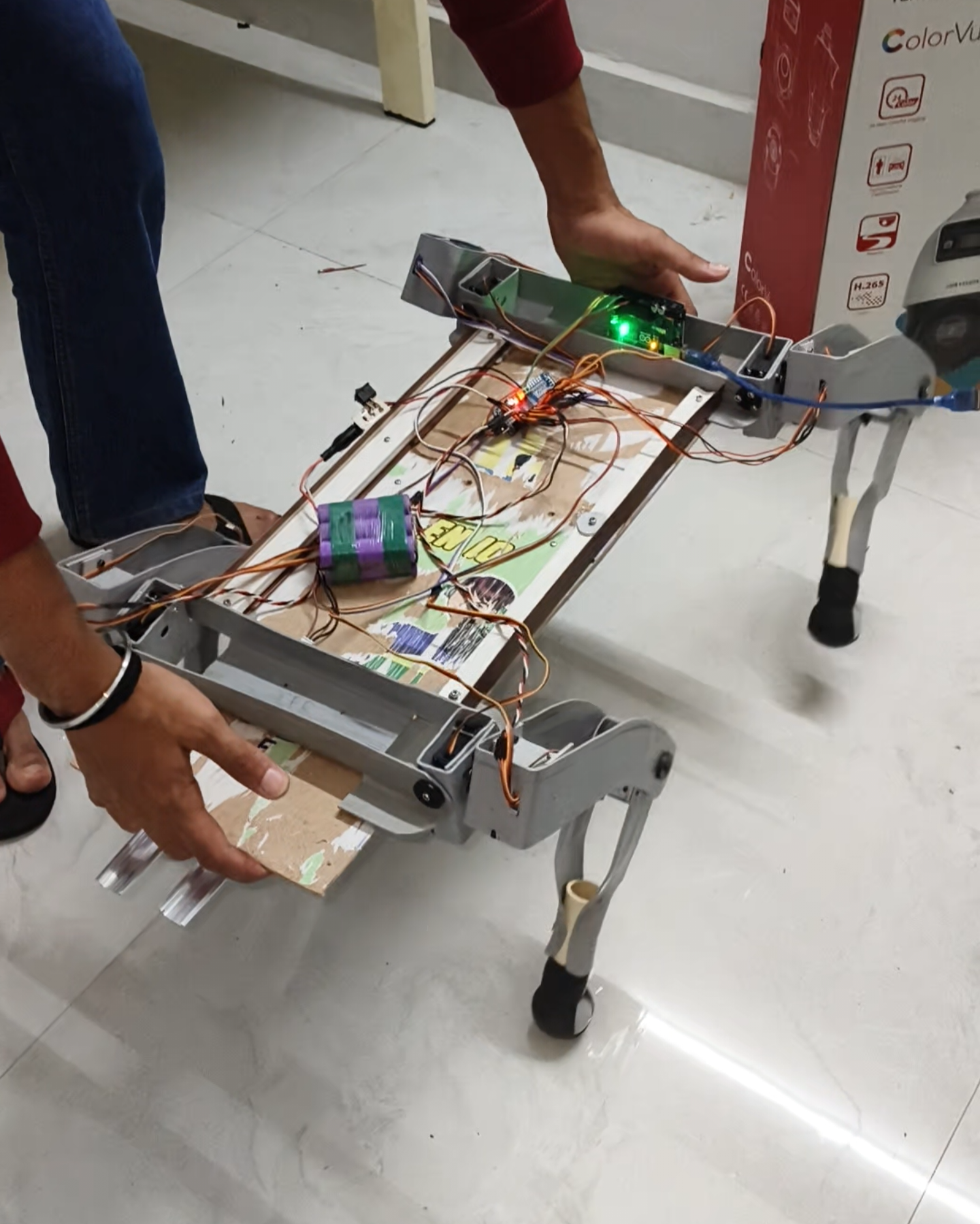
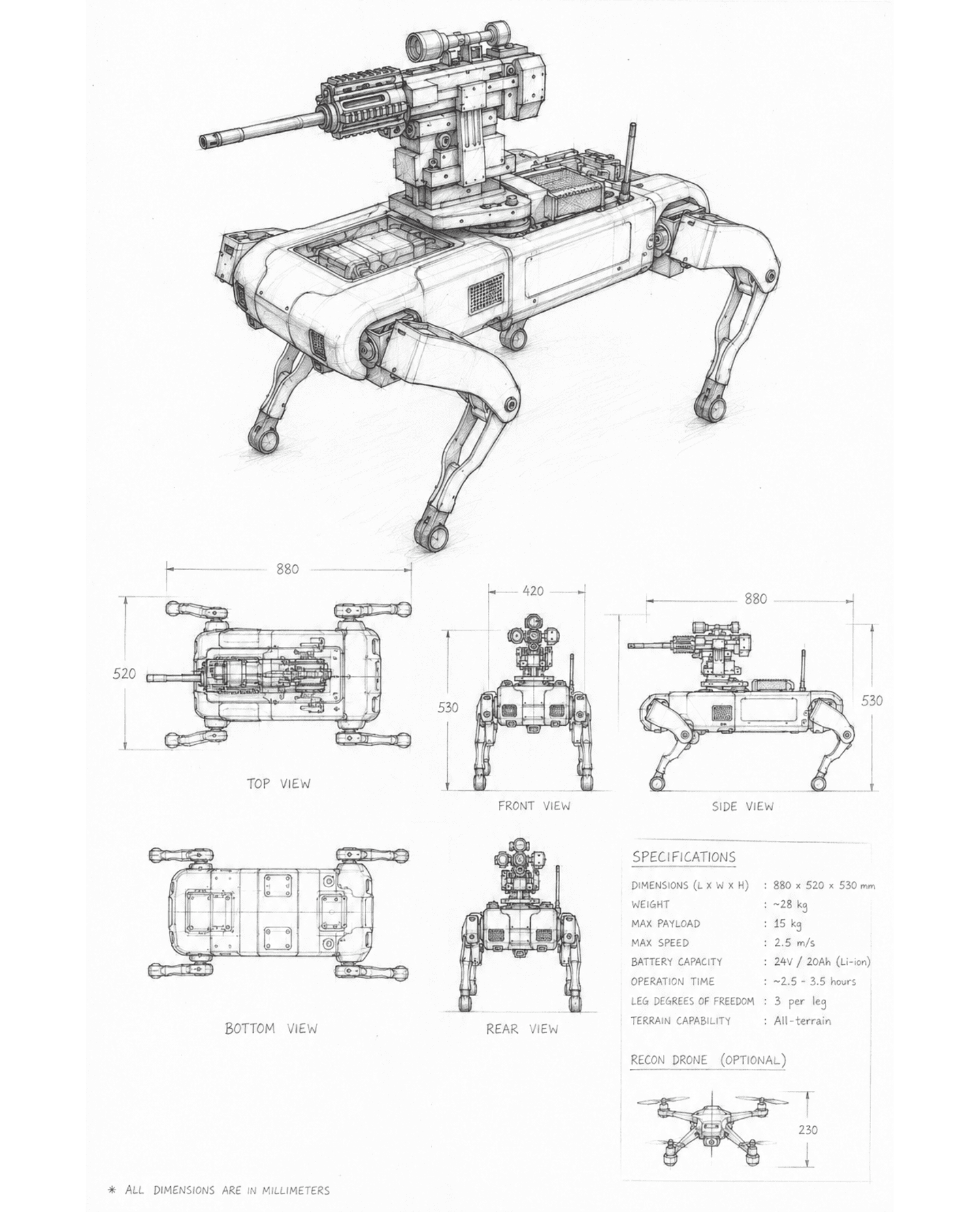
Quadruped Robot for Surveillance & Defence Support
A self-initiated defence-oriented quadruped robotics prototype focused on mechanical design, hardware integration, and basic locomotion. The robot was built completely from scratch and successfully tested for forward and backward walking gaits using a microcontroller-based control system.








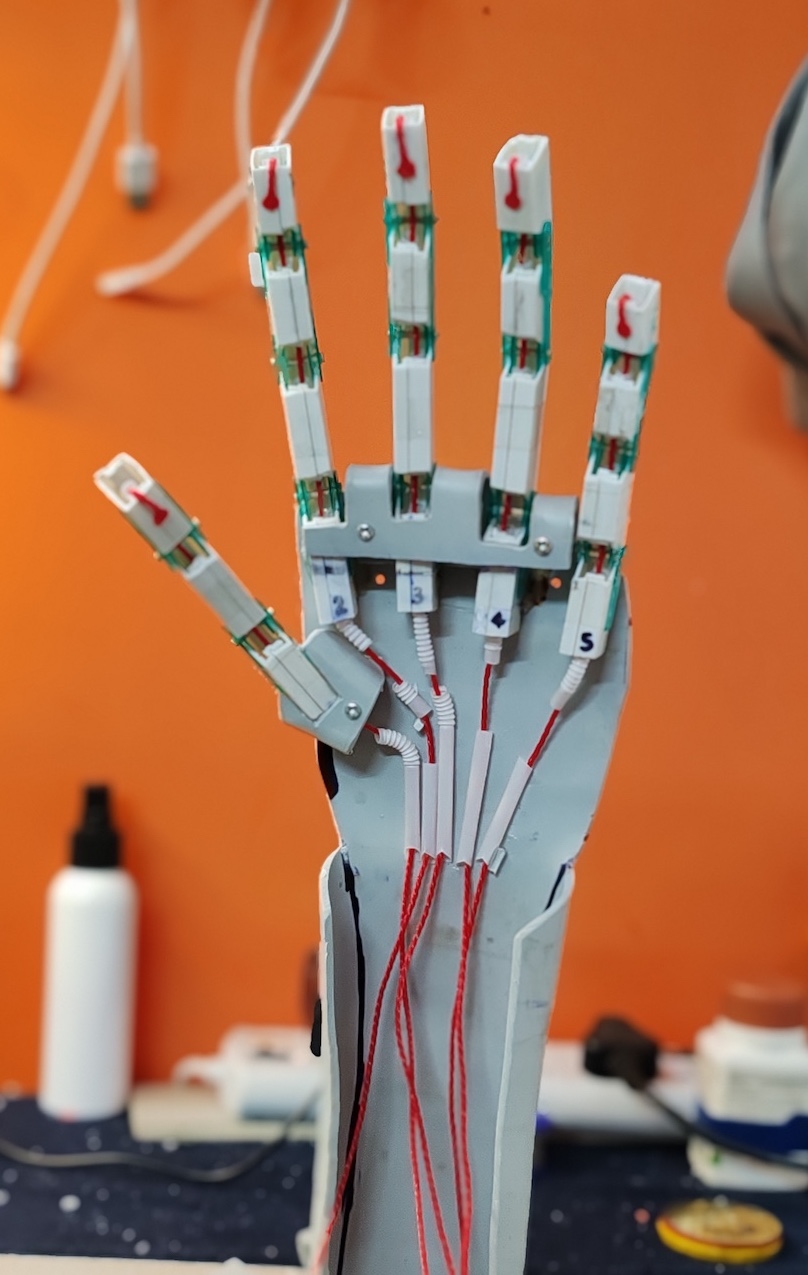
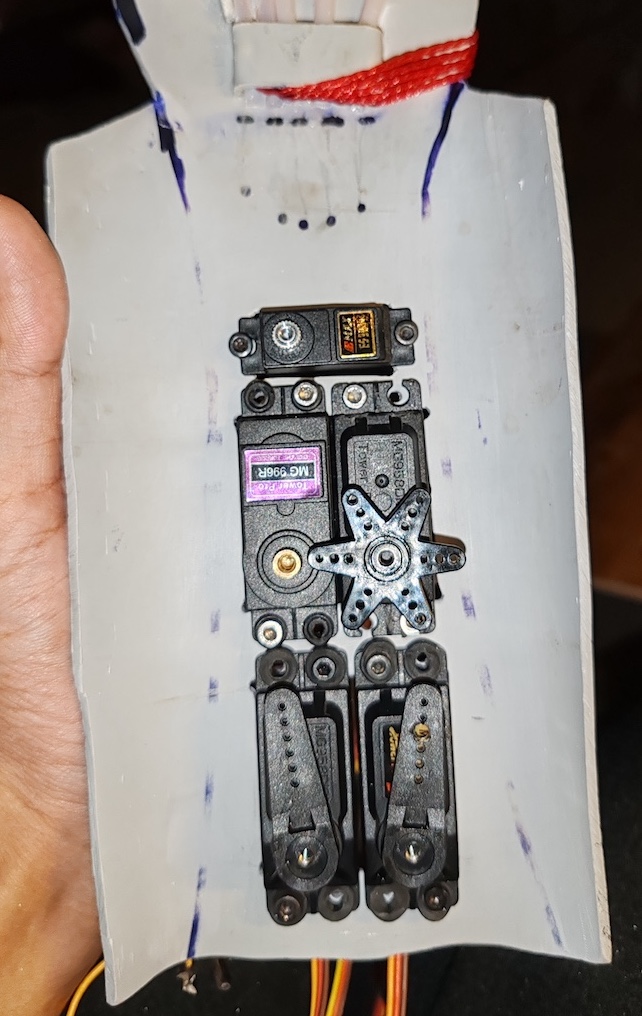
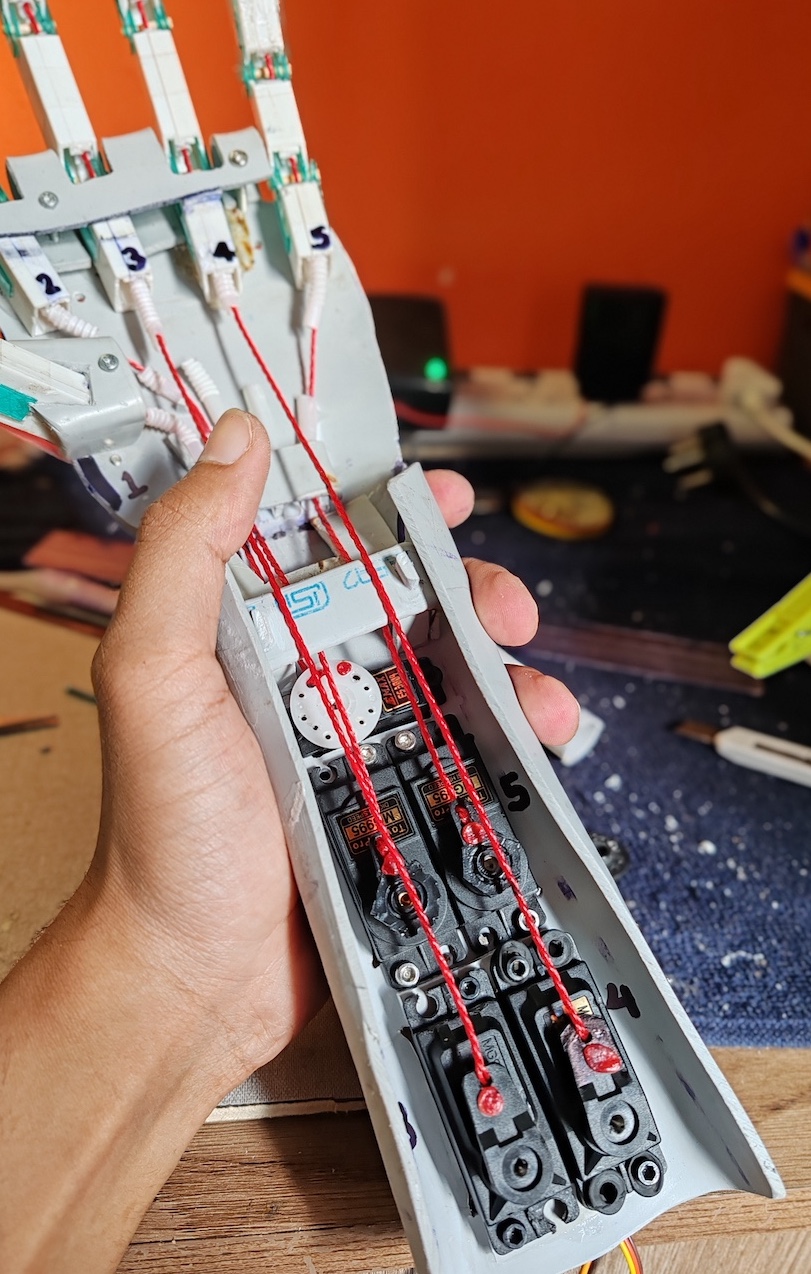
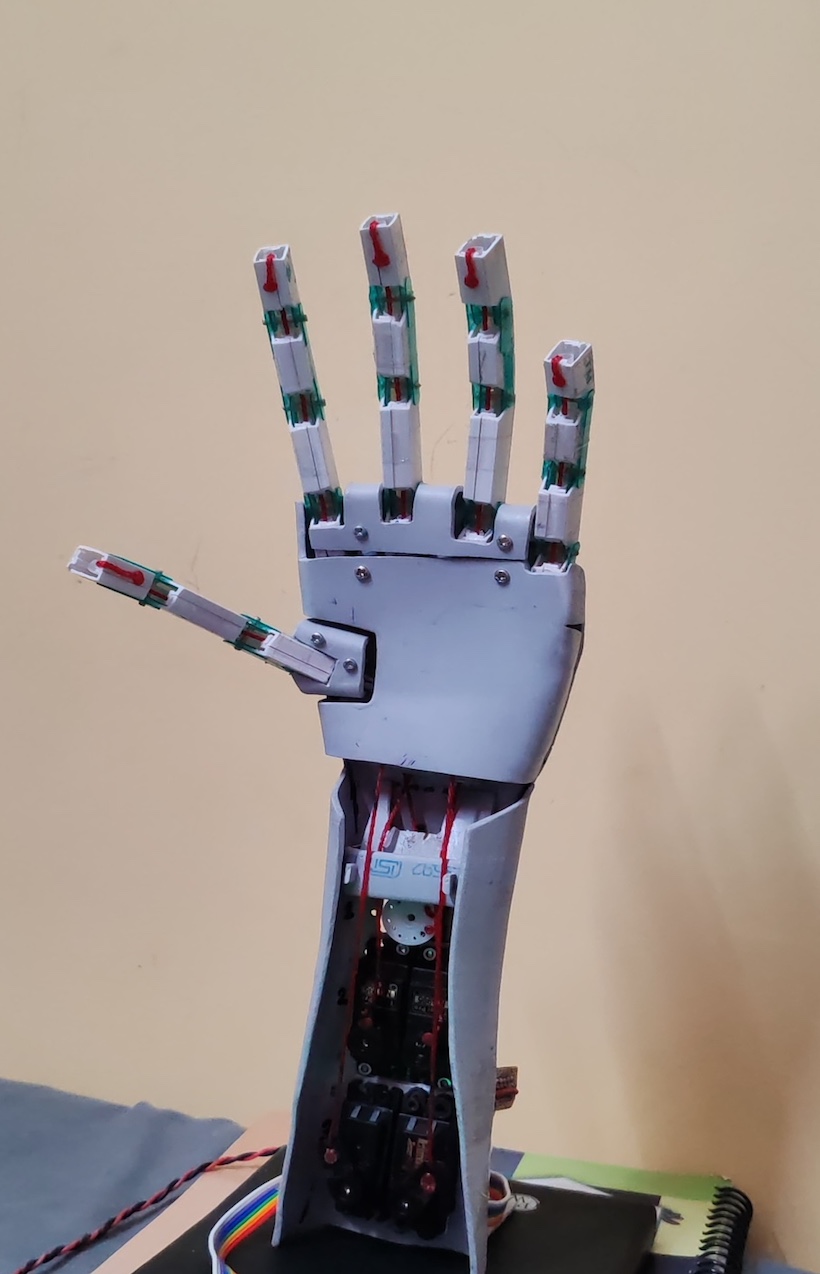
Human Gesture Replicating Robotic Hand
A gesture-controlled robotic hand that detects human finger movements and replicates them in real time. Designed using servo mechanisms and sensors for accurate and responsive motion control.

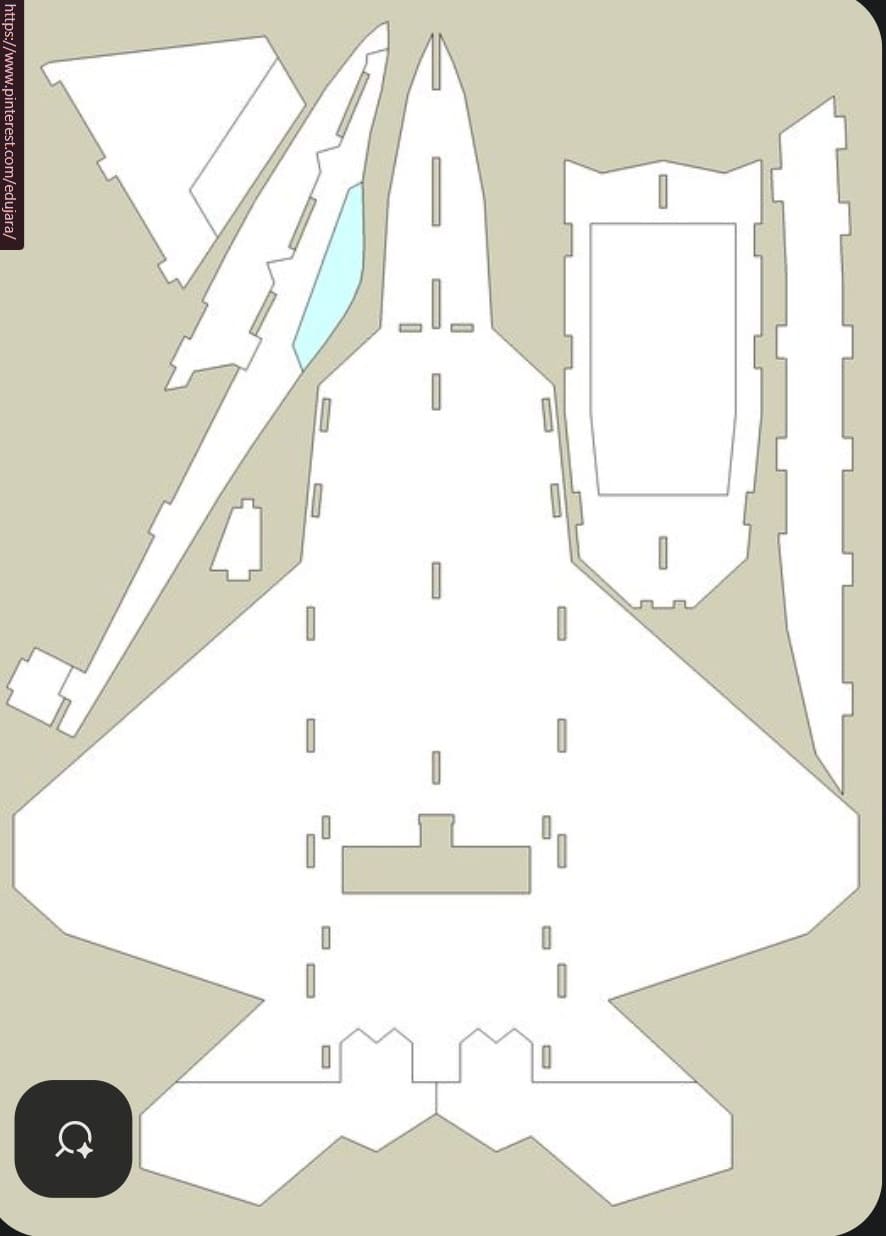
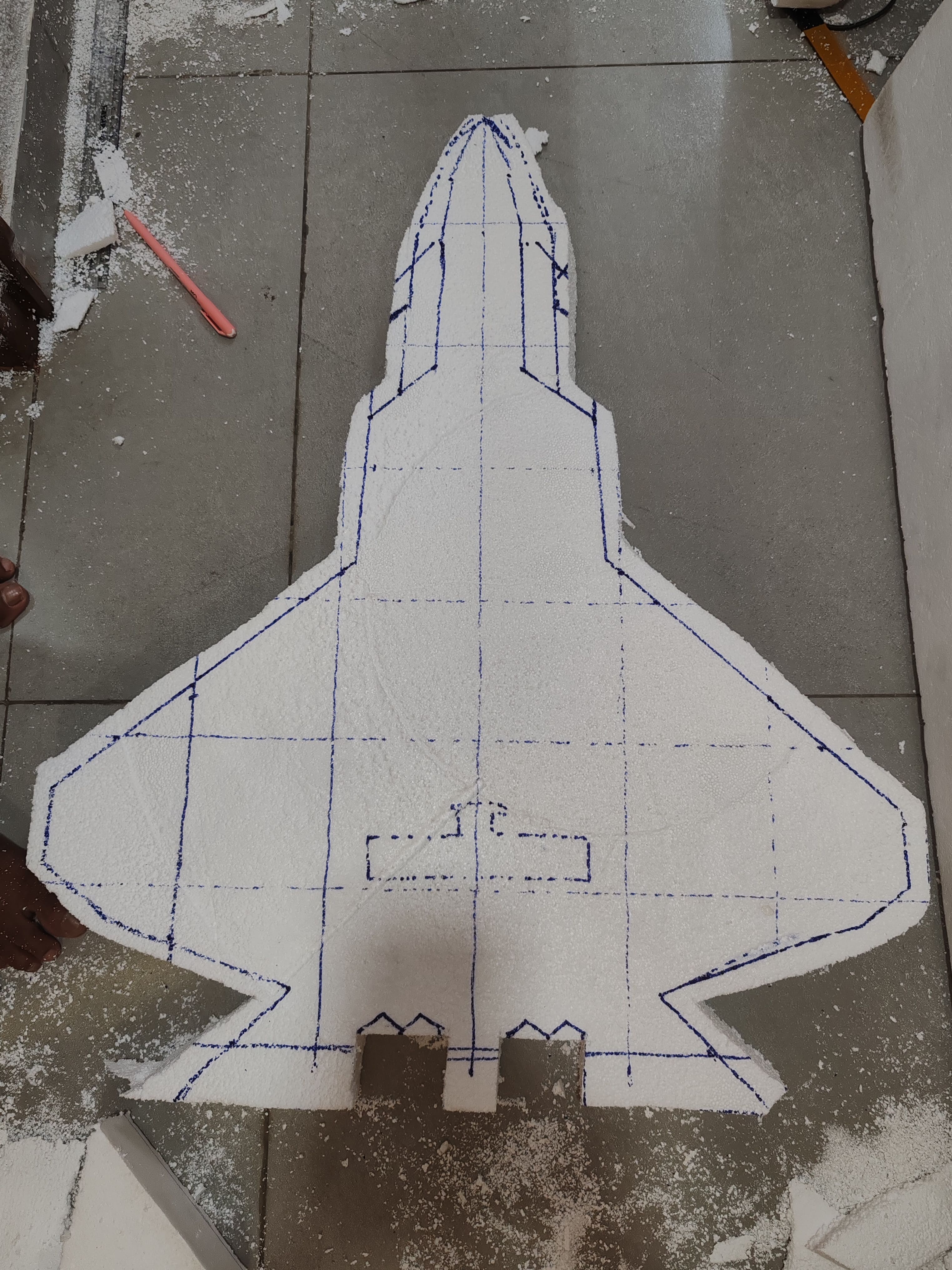
Scale Model of F-22 Raptor
A precision-built scale model of the F-22 Raptor, fully RC-controlled and battery-powered.



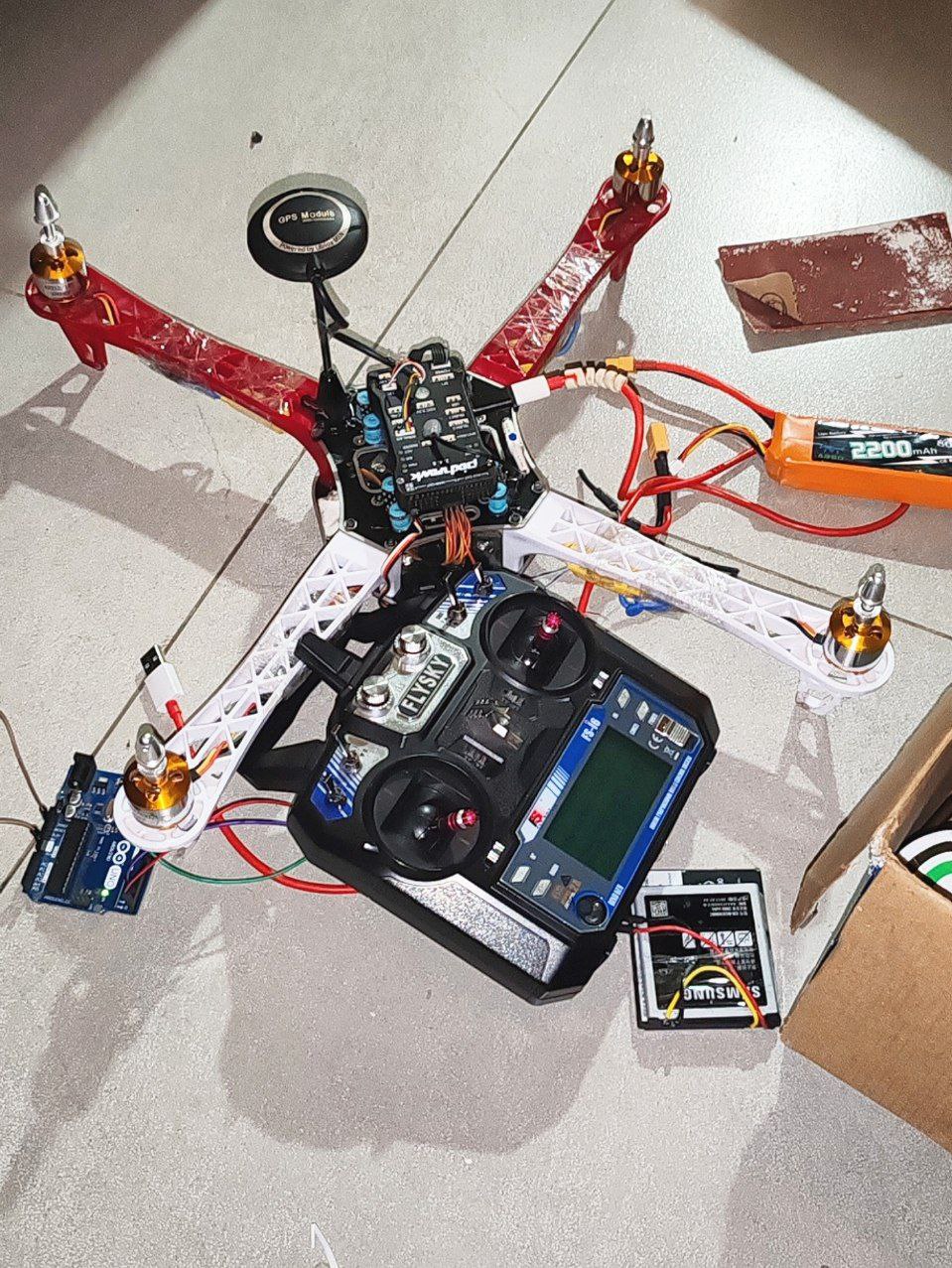
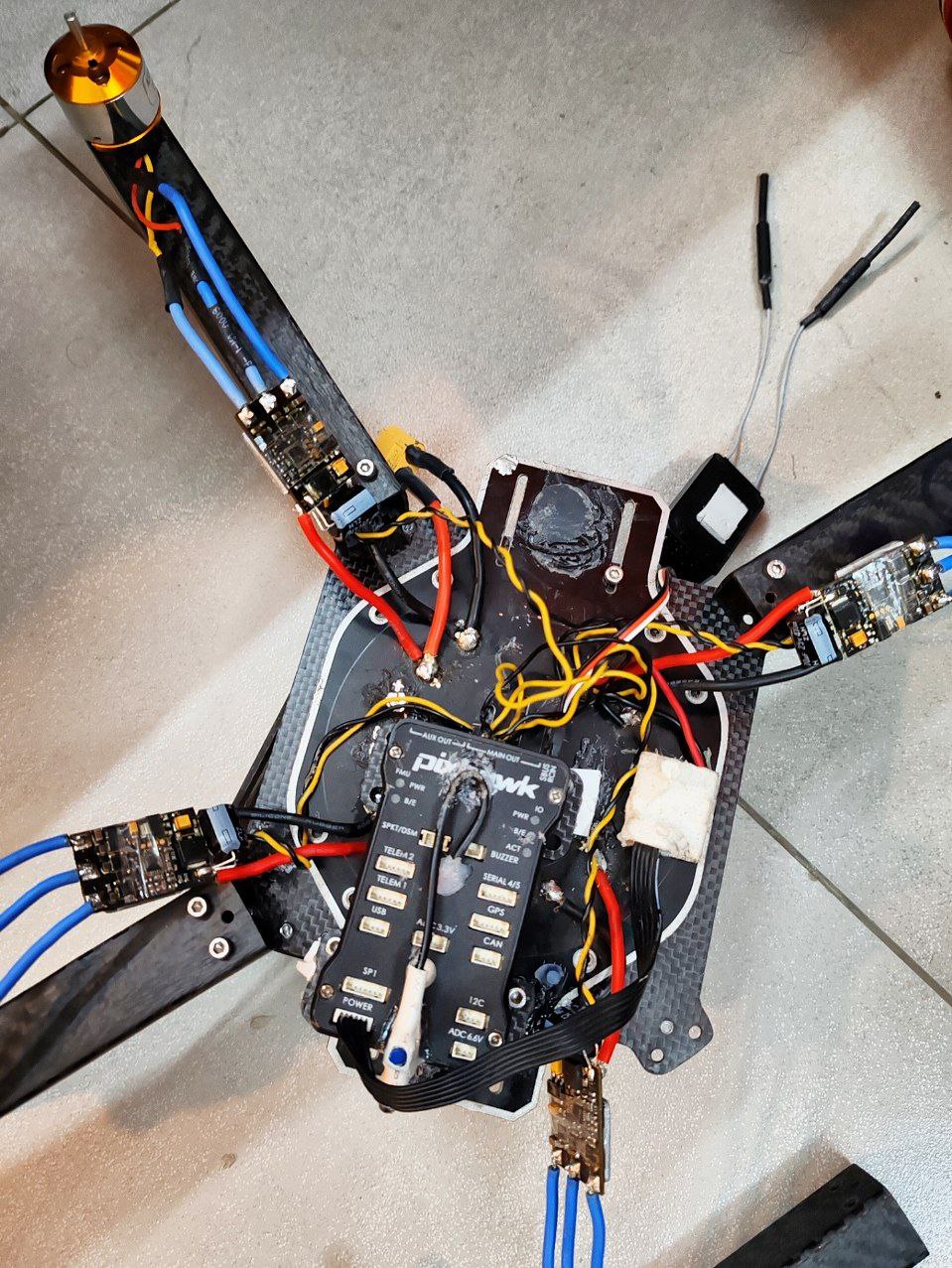
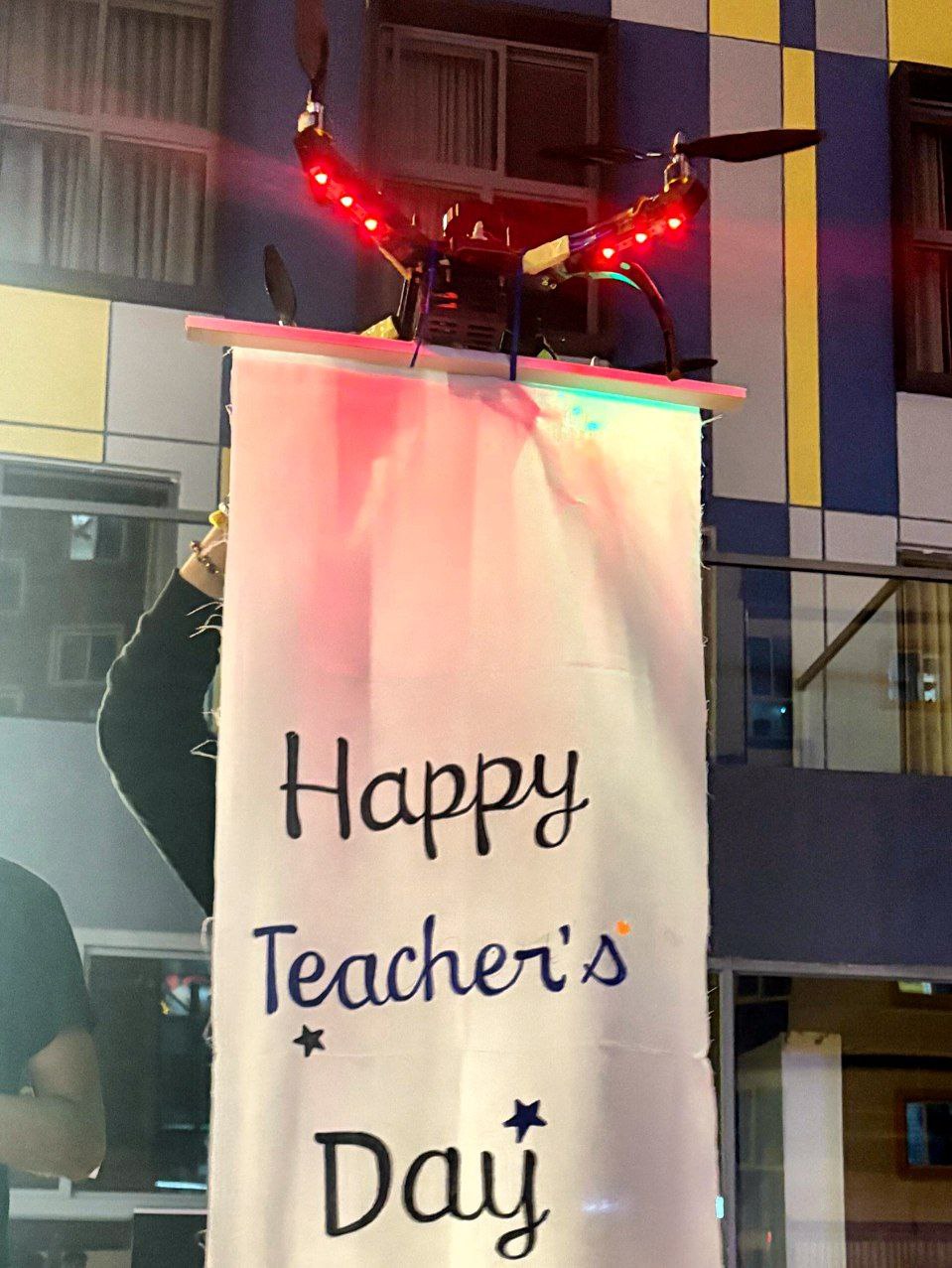
Custom Carbon-Fiber Drone with Aerial Filming Capability
A lightweight carbon-fiber drone built for stability, aerial filming, and creative payloads. Equipped with Pixhawk, FlySky 10-channel RC, 3S battery.




+2 More Projects
Coming soon...